
Flight dynamics in unsteady and non uniform environments
Presentation
Theme leader : Nicolas Vauchel
This theme focuses on the design of experimental, digital and analytical tools and methodologies for characterising the behaviour of aircraft at low speeds when flying in disturbed environments or outside conventional flight domains.
Context
Flight dynamics refers to all methods used to predict the evolution of an aircraft's attitude and trajectory. To make these predictions, a mathematical model describing the aerodynamic forces and moments acting on the system is required. This model is based on experimental and/or numerical data and relies on a mathematical structure adapted to the problem being studied. Flight dynamics is therefore a cross-disciplinary field involving aerodynamics, applied mathematics, data science and control.
In turbulent flight (post-stall conditions, turbulent environment), the flow around the lifting surfaces becomes highly complex, extremely unstable and often very unsteady. The simplifying assumptions typically made when studying normal flight may no longer be valid, and the models of aerodynamic forces and moments may become highly non-linear and unsteady. It is therefore necessary to select an appropriate model structure to describe the impact of these complex flows on the aircraft, as well as to identify and optimise the definition of experiments and/or simulations to acquire the data on which these models are based. Once an aerodynamic model has been established, tools are also needed to predict behaviour and determine the exit strategy for dangerous behaviour resulting from the flight dynamics study.
Objectives
The objective for this theme is to expand the laboratory's methodological and experimental toolbox to meet several needs:
- improve the robustness of forecasts in high-risk flight areas,
- integrate the weight of uncertainties linked to a lack of knowledge or simplification of model structures,
- develop analysis techniques that optimise and guide experimental exploration in order to best determine representation models in relation to their expected use.
The use of machine learning methods or data science in general is a research topic at the heart of this theme.
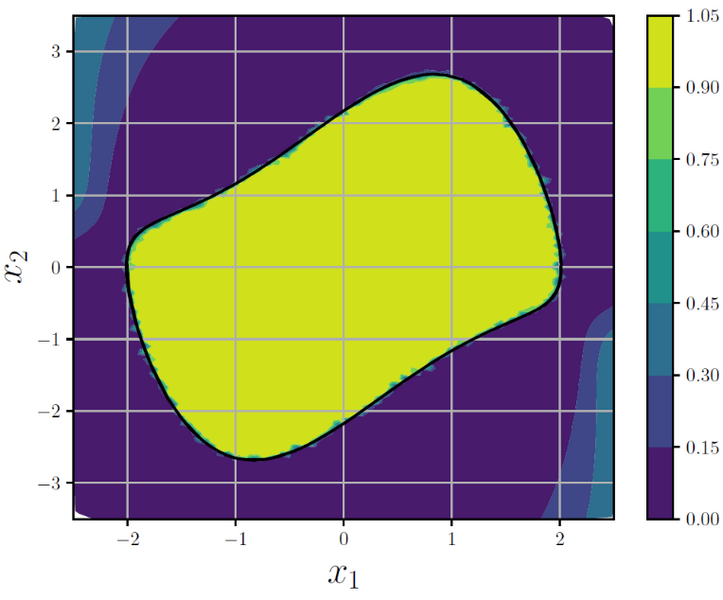
Certain behaviours, such as spins or spirals, correspond to equilibria in the dynamic flight system.
The theory of bifurcations applied to the dynamic system of non-linear flight therefore provides an overview of all the regimes accessible to the aircraft at asymptotic times and allows the evolution of these regimes and their stability to be analysed when a control parameter varies. It would be particularly useful to estimate the regions of attraction associated with these equilibria, corresponding to the set of initial conditions tending towards this behaviour at asymptotic times. To this end, machine learning approaches and statistical techniques already used in the context of bistability in turbulence are being tested.
As part of ongoing work on the analysis of extreme events in urban environments (see ‘turbulence’ theme), notably pursued by an ONERA/Region thesis, the study of the flight dynamics of drones operating in highly disturbed environments is a key area of research. The integration of these phenomena into dynamic flight modelling is a key focus of the research. At the same time, a method for reconstructing the aerological field of the urban canopy is being developed. This combines prior knowledge of the field with local measurements acquired in situ by the drone.
The formulation of a mathematical model describing the aerodynamic forces and moments acting on an aircraft is a crucial step in flight dynamics studies. After selecting an appropriate model structure, a wind tunnel test plan and/or numerical simulations are carried out in order to acquire the data necessary for model identification. This test (or simulation) plan is typically defined a priori, even before the model is built. As a result, it is not always easy to ensure that the test matrix sufficiently covers the phenomena of interest that we wish to model. The objective of this research area is to study and develop techniques for guiding experimentation. The creation of a digital twin (as part of an ONERA/Region thesis) and the use of adaptive sampling are being studied to meet these objectives.
Improving aerodynamic models to incorporate a greater number of effects is one of the research areas within this theme. This improvement is based on two pillars:
- Enrichment of aerodynamic coefficients – taking into account more interaction effects between state and control variables (control surfaces, propeller propulsion, etc.).
- Extension of the equations of motion – incorporating additional phenomena, such as modelling wind gusts and, more generally, taking atmospheric turbulence into account.
In this context, modelling the impact of wind gusts on airships is one of the issues being studied. In addition, an ONERA-Région thesis focuses on an experimental study of the aerodynamic interaction between the propellers of multirotor drones.
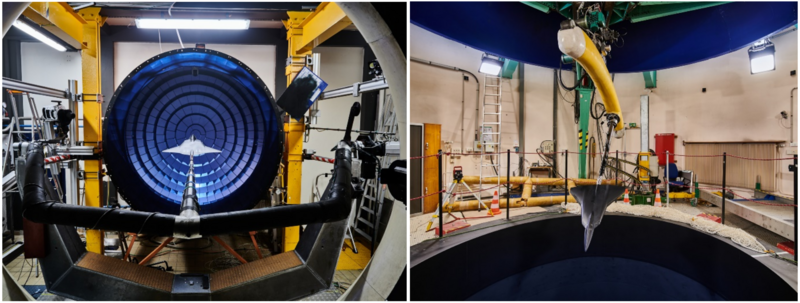
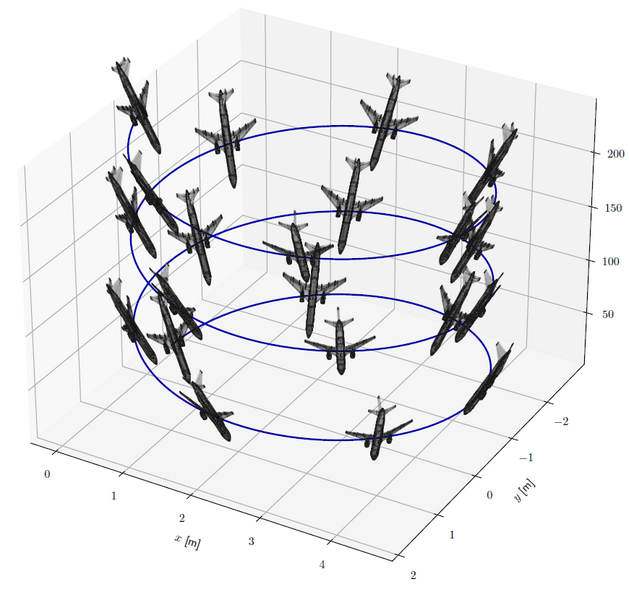
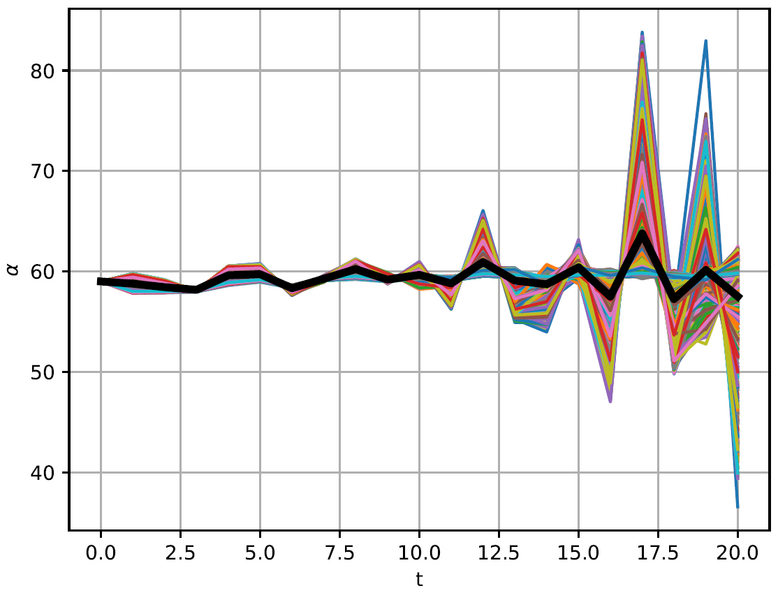
 et simulation d’attitude sur cette même géométrie à l’aide d’un modèle aérodynamique obtenu (à droite")
The aerodynamic model, constructed from experimental and numerical data, inevitably contains uncertainties related to the accuracy and variability of these measurements. Furthermore, the choice of a simplified structure for the model introduces an additional source of uncertainty related to the ability of the formulation to accurately capture physical phenomena. It is therefore essential to quantify all sources of uncertainty and propagate them through the non-linear equations of flight dynamics in order to assess their influence on predicted behaviour.
Deep reinforcement learning makes it possible to design a control law using a neural network that associates the state of the system with the control actions to be selected to accomplish a given task. The network is trained during multiple iterations of the simulation, with the aim of maximising a reward function designed to encourage the desired behaviour. In the context of post-stall flight dynamics, the study focuses on the use of deep reinforcement learning to determine a control law capable of ensuring optimal spin recovery. The reward function will be defined in such a way as to minimise altitude loss during recovery.